prm motion planning
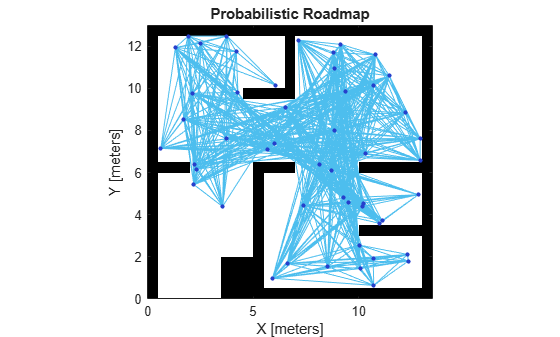
It is based on a probabilistic road map PRM algorithm for generating collision free paths between a set of entry and exit configurations for a redundant robot laser cutting machine. Probabilistic Roadmaps PRM A probabilistic roadmap PRM is a network graph of possible paths in a given map based on free and occupied spaces.
2
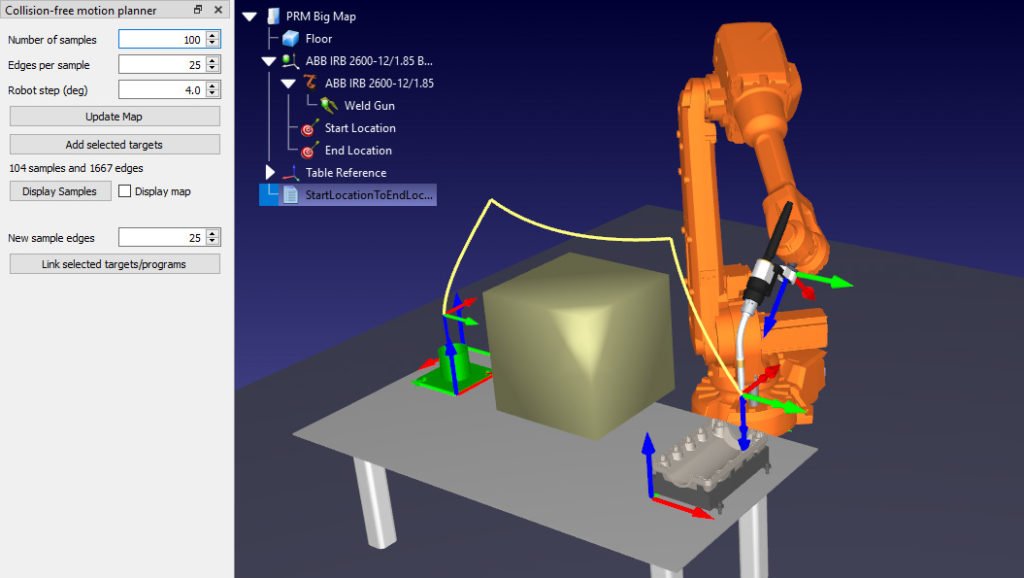
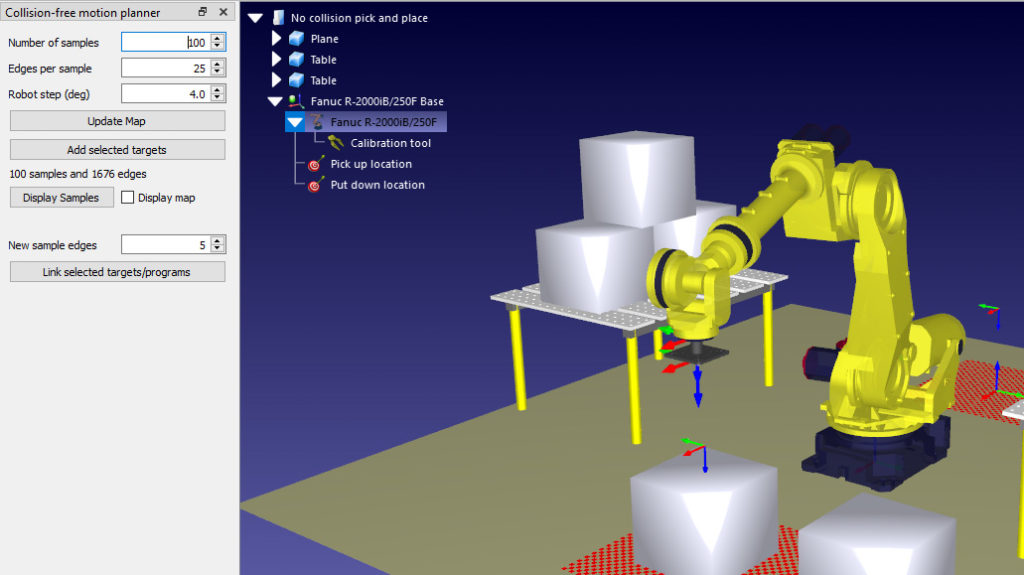
Using the PRM Motion Planner There are two distinct phases when using PRM motion planning.
. Apply easily to high-dimensional C-space 4. A multiple-query planner is one that invests time in developing a good representation of C-space so that future motion-planning problems in that space can be solved quickly. Pybullet_planning includes this package as a built-in component as it is frequently used.
Motion Planning Library to accompany turtlebot3_from_scratch repository. Cannot move sideways or rotate on. Parti Rakyat Malaysia party in Malaysia.
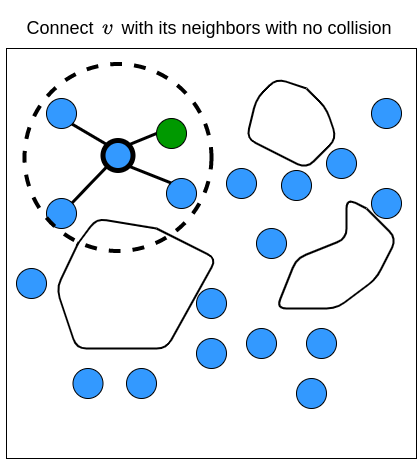
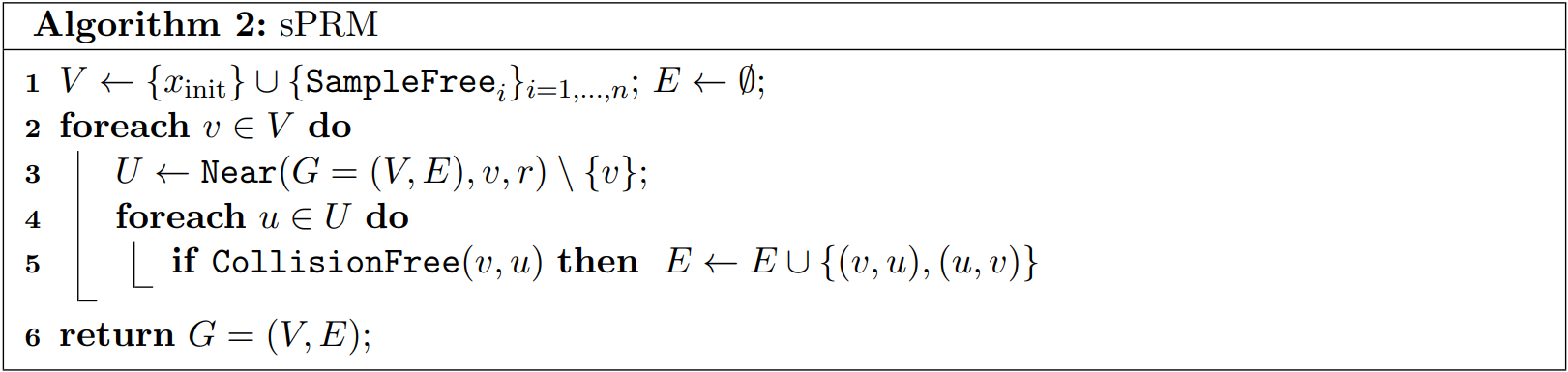
Check for collision free configuration check for collision free path segment consider that the path between two configurations is a straight line parameterized by 01 sample the interval and check each sample whether its collision free for more details on alternative sampling strategies section 534 motion planning. Deployed PRM Grid Map A Theta LPA D Lite Potential Field and MPPI. Shortest Path or minimal time Smoothess Motion Planning Constraints.
Along the found path pick two vertices x t1 x t2 and try to connect them directly skipping over all intermediate vertices. Motion_planning is an open source software project. The sampling strategy ensures that the end effector path complies with process constraints.
In the case of a car non-holonomic. Partido Republicano Mineiro or Mineiro Republican Party Brazilian party 1888-1937. Basic Motion In the Motion Planning panel select the Planning tab.
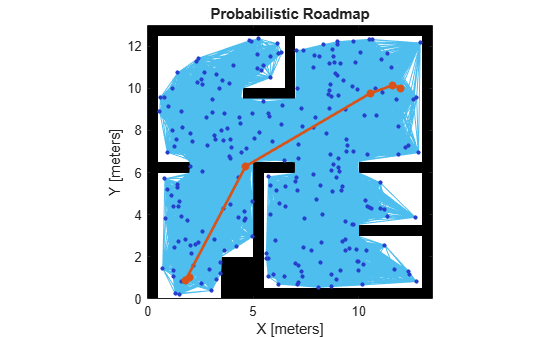
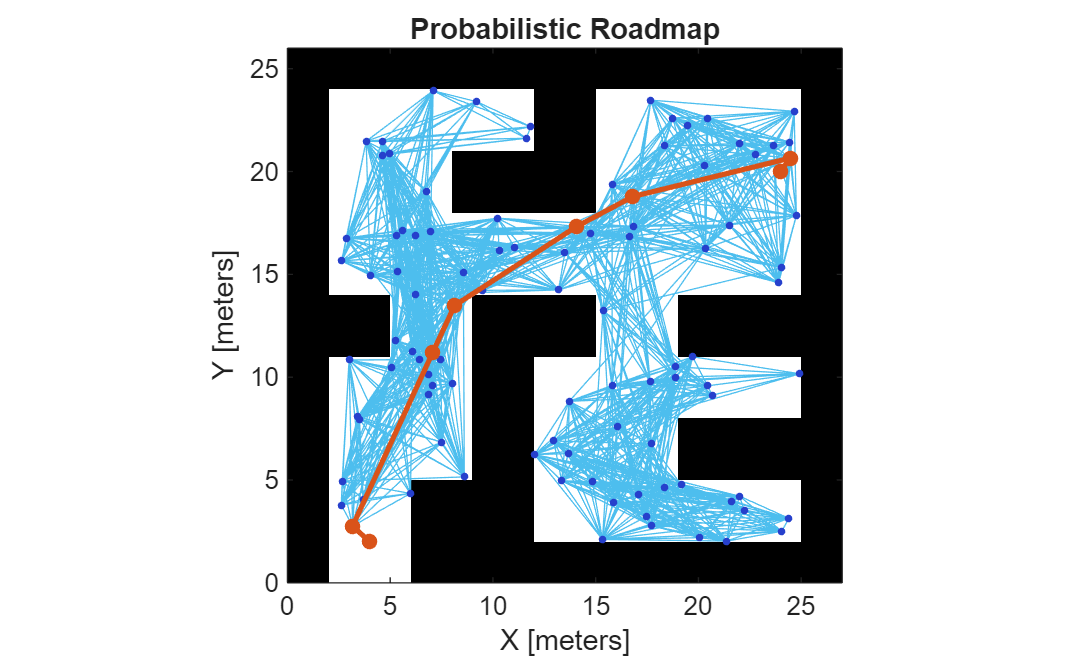
The mobileRobotPRM object randomly generates nodes and creates connections between these nodes based on the PRM algorithm parameters. Observe the goal position in the graphics window. Under the Query section expand the Select Goal State section.
If the C-space changes often however a single-query planner attempts to find the solution to a single motion-planning problem as quickly as possible. PRM and Multi-Space Planning Problems. In this section we provide details about our algorithm and describe how each step is parallelized.
These are performed separately in RoboDK which improves the efficiency of the feature. Click Plan to see the robot motion generated by the MoveIt. Deployed PRM Grid Map A Theta LPA D Lite Potential Field and MPPI.
Probabilistic Roadmap PRM Rapidly-Exploring Random Tree RRT. However PRM planners are unable to detect that no solution exists. This is a fork of Caelans motion-planners repo which is designed to be flexible and independent of simulation platforms.
Probabilistic RoadMap Planning PRM by Kavraki samples to find free configurations connects the configurations creates a graph is designed to be a multi-query planner Expansive-Spaces Tree planner EST and Rapidly-exploring Random Tree planner RRT are appropriate for single query problems. In an earlier video we learned that path planning based on a true roadmap representation of free C-space is complete meaning that the planner will find a path if one exists. The two phases are.
Very jagged often much longer than necessary. Partido Revolucionário de Moçambique or Revolutionary Party of Mozambique Mozambican rebel group 1974761982. Randomized motion planners tend to find not so great paths for execution.
This paper proposes a general. Master 1 branch 0 tags 117 commits control global_planner map READMEmd nuturtlerosinstall syllabuspdf READMEmd Motion Planning Library with ROS. Avoid all static and moving obstacles Vehicle kinematics and dynamics constraints.
Peoples Revolutionary Militia former Grenada militia. 441 Hierarchy Computation We construct a bounding volume hierarchy BVH for the robot and one for each of the obstacles in the environment to accelerate the collision queries. Support fast queries w enough preprocessing Many success stories where PRMs solve previously unsolved problems C-obst C-obst C-obst C-obst C.
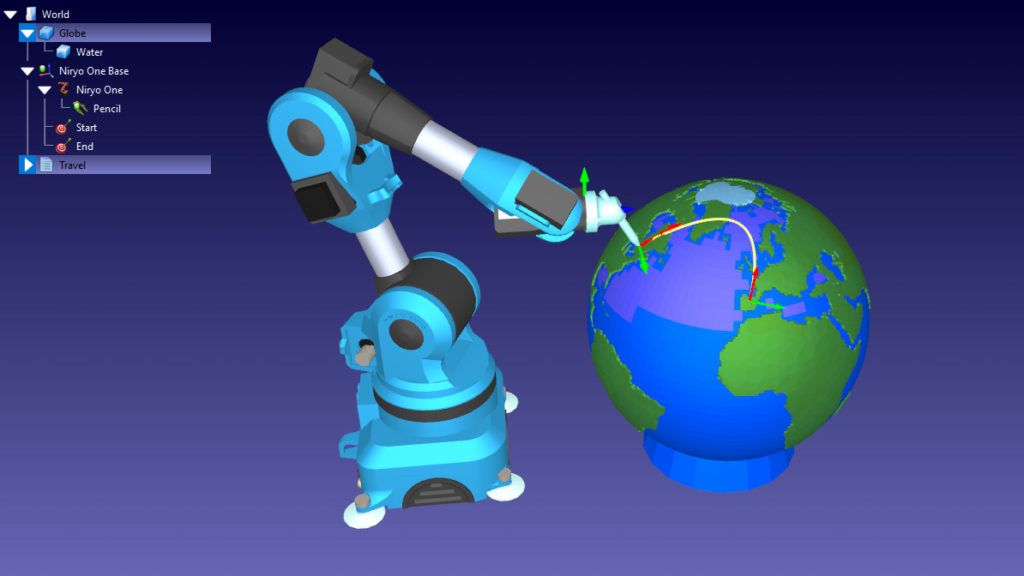
Do smoothing before using the path. 本文介绍的 概率路线图Probabilistic RoadmapPRM 属于综合查询方法其步骤如下 预处理 初始化 设 G VE 为一个无向图其中顶点集 V 代表无碰撞的构型连线集 E 代表无碰撞路径 初始状态为空 构型采样 从构型空间中采样一个无碰撞的点 alpha i 并加入到顶点集 V 中 领域计算 定义距离 rho 对于已经存在于顶点集 V 中的点如果它与 alpha i 的距离. Often path planning is used in combination with inverse kinematics.
Select and press Update. Multi-query planners such as PRM. Destroy the path planning task with simOMPLdestroyTask.
Do not construct the C-space 3. 44 Parallelized PRM Motion Planning Algorithm. There are a bunch of different motion planning algorithms available for robotics ranging in complexity from pretty basic to extremely elaborate.
We use the GPU. In a pick-and-place task for instance. Motion planning is a term used in robotics for the process of breaking down the desired movement task into discrete motions that satisfy movement constraints and possibly optimize some aspect of the movement.
This video introduces the popular sampling-based probabilistic roadmap PRM approach to motion planning. How to handle many motion planning queries. CoppeliaSim offers pathmotion planning functionality via a plugin wrapping the OMPL library.
On the other hand a taskmotion planner must often consider many subtasks a fraction of which only admit feasible trajectories. Nodes are connected based on the obstacle locations specified in. An alternative name for Al-Shabaab militant group.
Moving back to the main topic Probabilistic Roadmap planning is used to determine the shortest andor optimal path between two specified points lets refer to these points as nodes now. The new RoboDK motion planner uses an algorithm called PRM which stands for Probabilistic Roadmap It is a very common type of motion planner for reasons well get into in a moment. The plugin courtesy of Federico Ferri.
Motion Planning Library to accompany turtlebot3_from_scratch repository. We are now up-to-date with commit e6f23053e of motion-planners. Motion Planning Motion Planning Objectives.
Probabilistic RoadMaps PRM are an effective approach to plan feasible trajectories when these exist. The slower construction phase only needs to be performed once whilst the quicker query phase can be repeated many times. It involves getting a robot to automatically determine how to move while avoiding collisions with obstacles 1.
Since it is difficult to analytically calculate a true roadmap we.

A Lazy Probabilistic Roadmap Planner For Single Query Path Planning Semantic Scholar
2
Probabilistic Roadmaps Prm Matlab Simulink
Path Following For A Differential Drive Robot Matlab Simulink
Motionplanninghigherdimensions

Motion Planning Algorithms Rrt Rrt Prm Mit 6 881 Final Project Youtube
Robotik Ep 3 Multi Query Motion Planning With Probabilistic Roadmaps Prm Rey S Blog Democratizing Robotics

How Does Motion Planning For Autonomous Robot Manipulation Work Technical Articles
Why Is Motion Planning A Big Trend Just Now Robodk Blog

The Goal Of Motion Planning Is To Find A Path In Free Space Left A Download Scientific Diagram
Probabilistic Roadmaps Prm Matlab Simulink

Robotic Path Planning Demonstration Using Prm Prm Rrt Rrt Youtube

Motionplanninghigherdimensions
Path Planning Using R Prm Download Scientific Diagram
2
Robotik Ep 3 Multi Query Motion Planning With Probabilistic Roadmaps Prm Rey S Blog Democratizing Robotics
Back To Basics Robot Motion Planning Made Easy Robodk Blog

Prm Probabilistic Roadmap Method In 3d And With 7 Dof Robot Arm Youtube
How It Works Robodk S New Prm Motion Planner Robodk Blog



Comments
Post a Comment